

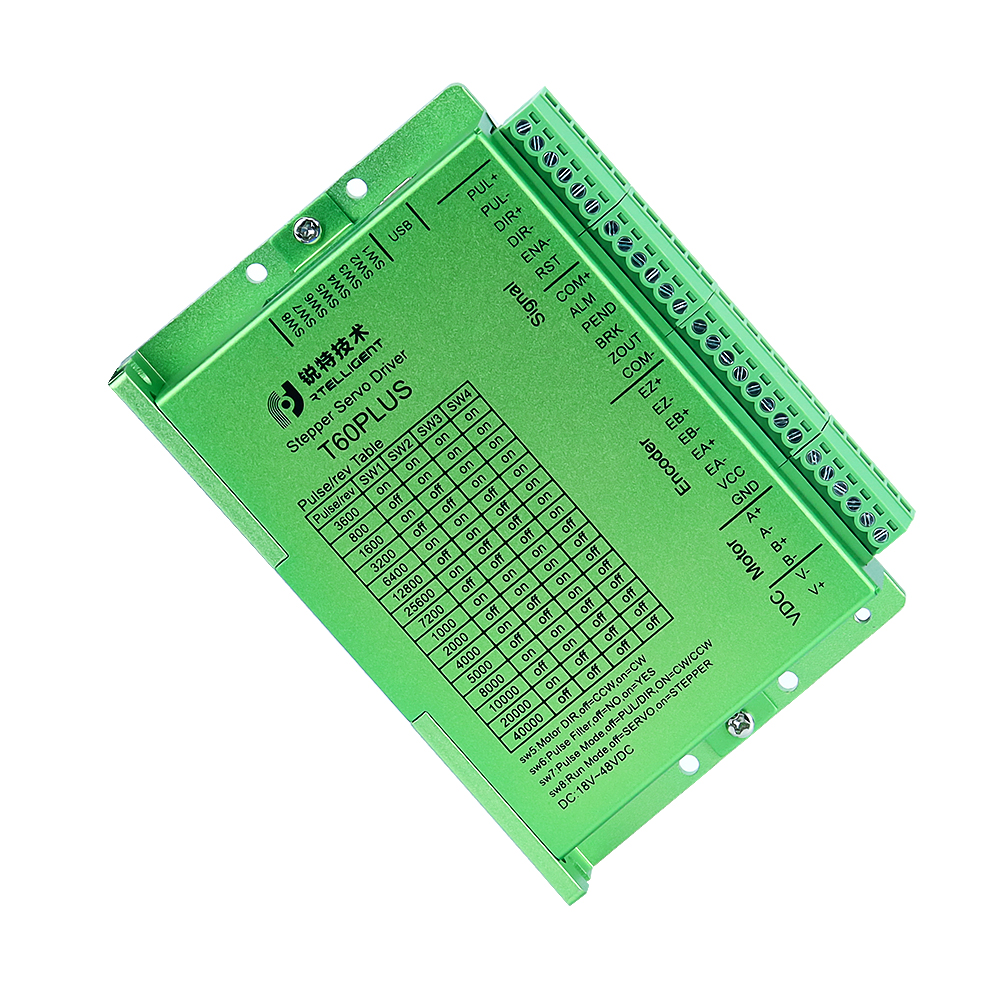


Pulskontrôle 2-faze sletten loop stappendrijving T60Plus


Produktyntroduksje



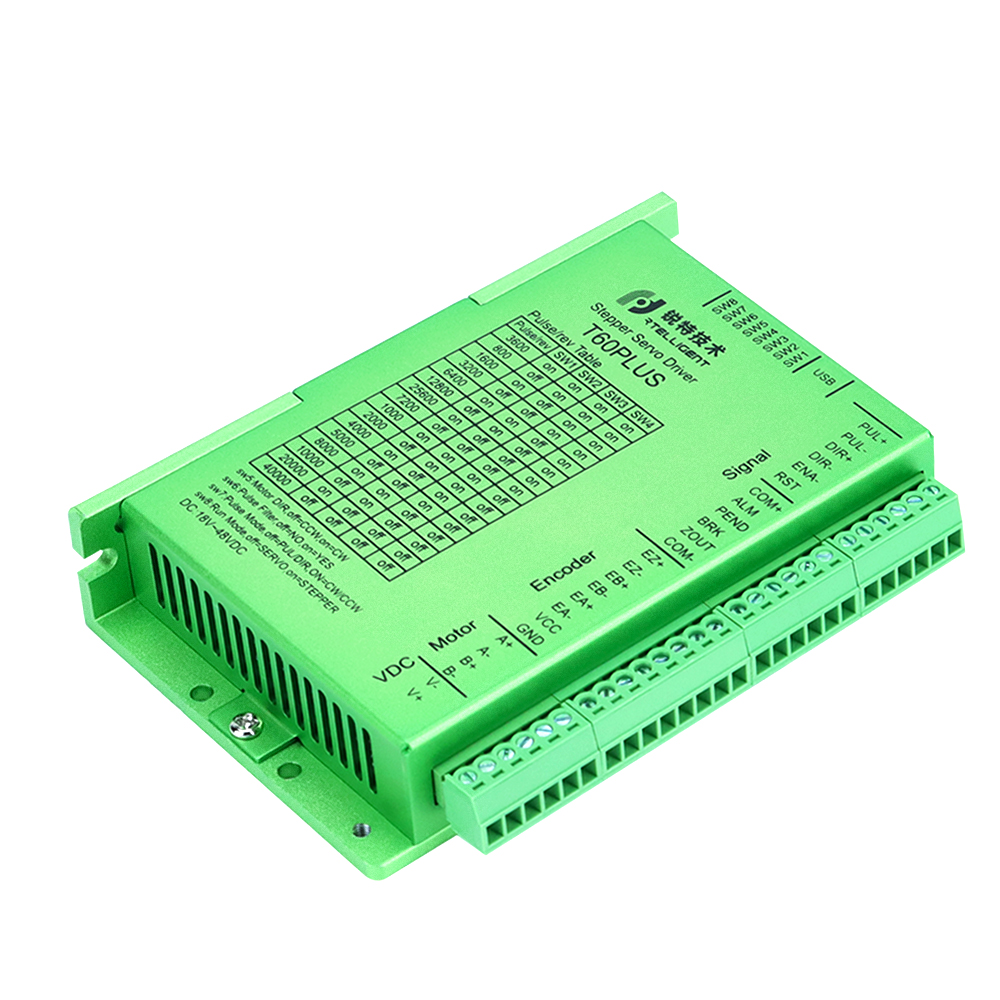
Ferbining

Funksjes
| Streamtafier | 18~48VDC |
| Kontrolepresyzje | 4000 pulsen/r |
| Pulsmodus | Rjochting en puls, CW/CCW dûbele puls, A/B kwadratuurpuls |
| Hjoeddeiske kontrôle | Servo-vektorkontrôlealgoritme |
| Ynstelling foar ûnderferdieling | DIP-switch-ynstelling, 15 opsjes (of debuggensoftware-ynstelling) |
| Snelheidsberik | Konvinsjoneel 1200~1500rpm, oant 4000rpm |
| Resonânsjeûnderdrukking | Automatyske berekkening fan resonânsjepunt om middenfrekwinsjetrilling te ûnderdrukken |
| PID-parameteroanpassing | Debugging-software om de PID-karakteristiken fan 'e motor oan te passen |
| Pulsfilter | 2MHz digitaal sinjaalfilter |
| Alarmútfier | Alarmútfier foar oerstream, oerspanning, posysjeflater, ensfh. |
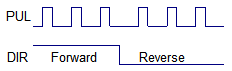
Pulsmodus
De sinjaalynterface fan standert T-searje-oandriuwing is pulsfoarmich, en de T60PLUS V3.0 kin trije soarten pulskommandosignalen ûntfange.
| Puls en rjochting (PUL + DIR) |
|
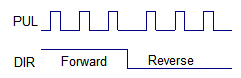
| Dûbele puls (CW + CCW) |
|
| Ortogonale puls (A/B ortogonale puls) | 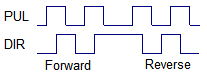 |
Mikro-stap-ynstelling
| Puls/omwenteling | SW1 | SW2 | SW3 | SW4 | Opmerkings |
| 3600 | on | on | on | on | De DIP-switch wurdt nei de steat "3600" draaid en de testsoftware kin oare ûnderferdielingen frij feroarje. |
| 800 | út | on | on | on | |
| 1600 | on | út | on | on | |
| 3200 | út | út | on | on | |
| 6400 | on | on | út | on | |
| 12800 | út | on | út | on | |
| 25600 | on | út | út | on | |
| 7200 | út | út | út | on | |
| 1000 | on | on | on | út | |
| 2000 | út | on | on | út | |
| 4000 | on | út | on | út | |
| 5000 | út | út | on | út | |
| 8000 | on | on | út | út | |
| 10000 | út | on | út | út | |
| 20000 | on | út | út | út | |
| 40000 | út | út | út | út |
Mikro-stap-ynstelling
Drive-terminals trochbrând?
1. As der koartsluting is tusken de terminals, kontrolearje dan oft de motorwikkeling koartsluting hat.
2. As de ynterne wjerstân tusken de terminals te grut is, kontrolearje dan asjebleaft.
3. As der tefolle soldeerwurk tafoege wurdt oan 'e ferbining tusken de triedden om in soldeerbal te foarmjen.
Hat in sletten loop stepper oandriuwing in alarm?
1. As der in ferbiningsflater is foar de bedrading fan de encoder, soargje der dan foar dat jo de juste encoder-ferlingkabel brûke, of nim kontakt op mei Rtelligent as jo om oare redenen gjin ferlingkabel brûke kinne.
2. Kontrolearje oft de encoder skansearre is, lykas de sinjaalútfier.
-
 Rtelligent T60PLUS V3.0 brûkershânlieding
Rtelligent T60PLUS V3.0 brûkershânlieding




